
There is a myriad of resources to explain the backward propagation of the most popular layers of neural networks for classifier problems, such as linear layers, Softmax, Cross Entropy, and Sigmoid. However, it is much less common to see resources for backward propagation for the convolutional neural network (CNN). Most deep learning resources introduce only the forward propagation for CNN, and leave the part of backward propagation for high level deep learning frameworks, such as TensorFlow or Keras, to worry about.
I am going to provide some quick visualizations of how to deal with the backward propagation for average pooling and maximum pooling layers of the CNN network in this post. For the sake of simplicity, I would use the filter with (height, width, stride) = (3, 3, 1) (i.e. we would not care about padding as we would just look at a partial area). We would be doing this in the Numpy library environment (of Python 3), as we are looking at the low level structures.
The average pooling layer was popular before the rise of maximum pooling layer in the 00s. The original LeNet-5, one of the pioneer CNNs in the 90s, is in fact using an average pooling layer after each convolution layers. The maximum pooling layer, in contrast, is relatively new. It is able to capture the features of the output of previous layers even more effectively than the average pooling layer, and is, unsurprisingly, more popular in modern CNN.
Backward propagation of Average Pooling Layer
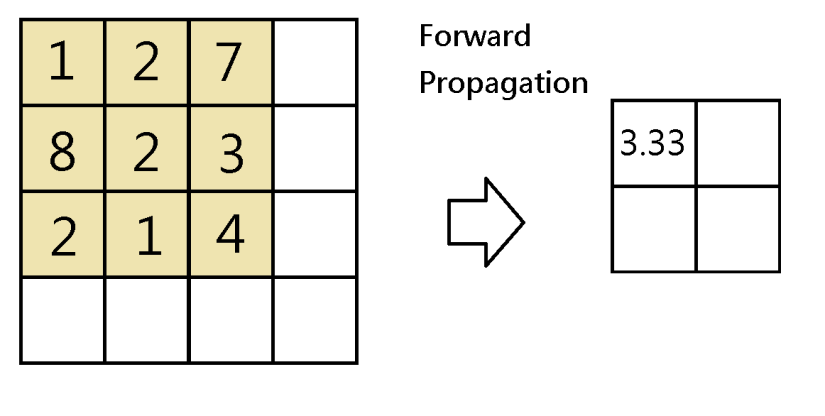
As you may know, average pooling layer takes the average of the values being scanned by the filters. Therefore, for each scanning index 




Please note that m is the m-th data point of the mini batch, while c is the c-th channel. Below is an illustration of when 
Therefore, for backward propagation, in finding out partial derivatives 




To do it in Numpy, given dA, we would obtain dA_prev by running the below code for all i and j:-
import numpy as np
average_dA=dA[m,i,j,c]/H/W
dA_prev[m, i:(i+H), j:(j+W), c] += np.ones((H,W))*average_dABackward propagation of Maximum Pooling Layer
The maximum pooling layer takes only the maximum number of the values being scanned by the filter. That is:-

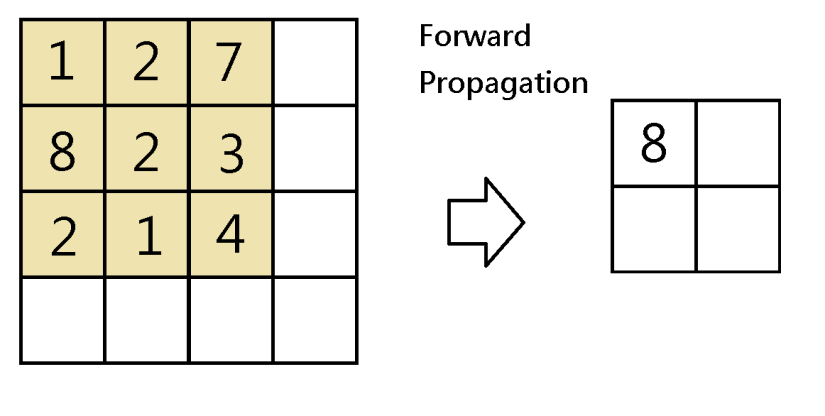
Since only the maximum value would impact the respective cell of the next layer,
To do it in Numpy, we would apply a mask to the dA as belowfor all i and j:-
a_prev_slice = a_prev[vert_start:vert_end,horiz_start:horiz_end,c]
mask = (a_prev_slice==np.max(a_prev_slice))
dA_prev[m, i:(i+H), j:(j+K), c] += mask*dA[m,i,j,c]Backward propagation of Convolution Layer, and conclusion
Another blogger, Mayank Agarwal, had written about the backward propagation of convolution layer with clear illustration. Understanding the backward propagation of the pooling layer would make backward propagation of the convolution layer a lot less complicated.
As we can see, the formulation of the backward propagation of the pooling layer may involve lots of notation (since data points, height, width, channels would form a rank-4 tensor) and have clumsy mathematical representation as the forward propagation involves partial operations in space, but that is not complicated in intuition.
